-
微信扫码登录
气体泄漏检测 在工业设施不仅耗时和危险但也有人类的错误。 RoboGasInspector(图1)发明提供一种改进的高效和安全检测的解决方案。 不同德国机构和企业的合作发明了这个新机器人系统,能够检测和本地化气体泄漏在隐蔽的地方。 机器人系统使用 FLIR GF320光学气体成像相机。

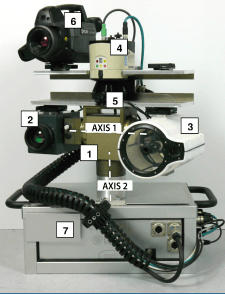
图1所示。 RoboGasInspector包含三个模块:链传动的移动平台、导航模块和检测模块。 注意FLIR GF320的单位。
财团的九个研究机构和公司,德国技术项目的参与者AUTONOMIK,开发了一个原型的自主移动机器人用于检测和定位 气体泄漏 在巨大的工业设施。 这些研究机构和公司发明了一种系统能够执行的检查在没有直接访问危险地区的工业设施,不需要人工干预。
机器人可用于执行 有针对性的检查 为特定的系统部分,或 定期检查 的设施。 自主移动机器人系统是实现通过一个遥控器与人工干预的选择在任何时间和不同导航传感器。 系统具有视频和光学气体遥测技术,它允许它检查部分的系统很难检查早些时候由于有限的可访问性。独特的发明 监控流程 使用现代自动化和测量技术以及机器人技术保证增强成本效益,效率和可靠性检查。 这些监测过程也防止技术人员劳动密集型,耗时和单调的工作。
这是一个合作研究项目的开始由施密特安德烈亚斯克罗尔博士和大家在卡塞尔大学的机械工程部门。 该项目资助的€240万联邦经济和技术部。安德烈亚斯克罗尔博士系的测量和控制技术卡塞尔大学的解释说,该项目旨在开发和验证一个创新的人机系统使用检查与当地情报和远程机器人气体测量技术的能力。 移动机器人应该检测和定位 气体泄漏 很大程度上独立。 他们还应该研究测量的数据和记录检查作为这个过程的一部分。
安全性和效率
运营商的工厂,如气体压缩站,炼油厂和化工厂,等等,给巨大的重要生产设备和人员的安全。它是非常重要的提供极端的保健无论使用炸药或有毒气体。 这凸显了需要进行严格的检查在沼气和天然气供应机构,以及化工行业。 一般来说,预防检验程序需要耗时的人员进行日常检查。
在所有的标准检查程序,工作人员检查适当的功能和系统只依靠经验和想法没有利用测量技术。施密特和安德烈亚斯克罗尔教授大家期待新的机器人系统允许 邮件自动化,监控和检查, 它也应该有能力立即回应的问题。 在常规程序像重复检查,有可能错误地俯瞰着可能的危险来源由于缺乏关注。独特的检验技术的发展和人类的性能和灵活性运营商关注处理技术系统在经济上是有益的,使人类从重复的日常任务,检验和扩展了报道任务。
第一次展示
Robo是第一次操作卡塞尔大学的。 检查完成的路线而无需人工干预,并成功地克服障碍和斜坡在整个过程。 机器人检查不同的管道检查指定地点和检测到 甲烷泄漏。 这一成功后,机器人被用来检查大型工业设施横跨几平方公里。 这个检查是执行在实验室条件下,环境因素,像太阳能和风能和系统操作所带来的混杂因素也包括在内。
Robo驱动系统和导航
Robo有三个模块,其中包括一个检测模块(图2),一个导航模块,和链传动的移动平台。 检查模块包含了 FLIR GF320光学气体成像相机 (图3)。链传动的平台标准电池和电力驱动。
有关的信息
案例研究:使用FLIR GF306光学气体成像仪监测六氟化硫(SF6)泄漏确定油气泄漏的程度从气体分馏装置使用传统方法和光学成像FLIR光学气体成像摄像机在贝壳Stenungsund帮助改善环境和安全图2。 多使用ABB传感器检测模块:pan-tilt单元(1)配备热成像摄像机(2),一个活跃的TDLAS测量装置(3),激光测距仪(4)、摄像机(5)和气体FLIR GF320热成像摄像机可视化(6),计算机和其他电子/电气模块被安置在一个切换内阁(7)。
导航模块配有GPS户外取向和二维激光扫描仪(前后,特别是重要的导航建筑物内)。 定期检查与数字地图下的面积的比较有助于链传动的RoboGasInspector控制它的位置在任何时间;阻塞等领域爆炸区和障碍也可以在这张地图上指出。
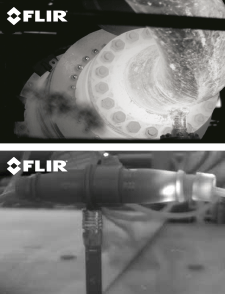
图3。 FLIR GF320可视化无形的气体泄漏地点为黑色的烟雾。
Robo能够避免意想不到的对象像桶,托盘,停放着的车辆,和人民的帮助下二维激光扫描仪,Kroll教授说。 机器人绕障碍当遇到他们,或停止直到路径的障碍被清除。
检查模块
检查模块包含了不同的计量仪器pan-tilt单元,包括一个远程甲烷泄漏探测器(RMLD),这是基于一个活跃的可转动的二极管吸收光谱(TDLAS)工具。 模块操作的帮助下一个红外激光。 当它反射的激光束到达水面,然后测量其残余强度。 此外,一个 FLIR GF320热成像相机 放在检查模块以可视化的气体。Robo内置气体传感器,确保机器人本身不产生任何风险。 这个传感器关闭整个系统从爆炸下限的10%(曼哈顿)起防止易燃的气氛中所有可能的损失。
独立的测量
机器人独立过程测量数据和识别模式。 RoboGasInspector也能检查特定的路线和执行测量完全本身。 除了这些活动,机器人保持连续接触控制房间,也可以从那里通过远程控制,如果必要的。 为了这个目的,提供了一个摄像机的云台测量模块。 在正常的操作模式下,RoboGasInspector功能独立,把几乎所有的数据通过WLAN控制室。
同时,系统原型已经成功地展示了其应用程序和功能的电池测试。 在这些测试中,导航系统,驱动装置和互补的传感器系统(图4)表现非常好。 RoboGasInspector帮助 独立的气体探测和泄漏定位 在不容易进入的地区。 它还可以防止人类的需要核查人员在高度危险的环境。
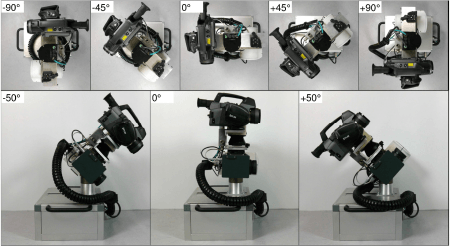
图4。 平移范围(从上图)和倾斜范围(从下面侧面)的传感器系统
在部署之前在工业生产中,需要额外的发展,例如防爆和软件领域。 在部署之前在商业环境中,重要的是要澄清所有法律问题。 一定自主移动气体探测和泄漏定位机器人目前可以使用,它还将加强安全。













































































